RMRC 救援赛
大赛介绍
一、赛项背景
为了传承红色基因、培育尊崇文化。在中华民族迈进新的百年征程的今天,聚焦青少年政治启蒙和价值观塑造,将科技教育与爱国主义教育、集体主义教育有机结合,鼓励新时代的青少年们,继承革命先辈的理想,勇攀科技高峰。引导青少年设计创作充满科技智慧的机器人,挑战前进道路上的艰难险阻,用实际行动向革命先辈致敬,为建设科技强国、实现中华民族伟大复兴而努力奋斗。
比赛不限定器材品牌,让更多的青少年能够参与到开放创新的科技活动中,不受成品器材限制地发挥想象力,创新性地设计和开发机器人项目。
二、赛项概要
1.组别设置:

备注:表格中标注“●”代表该组别设置对应的项目
2.每人限报一个项目;参加 RMRC 赛项的中学生均可以再报一个其它机器人赛项。
3.指导教师:不多于两人,由各学科教师、科技辅导员、少先队辅导员或校团委负责人共同指导。
4.国际赛事:RMRC 赛项与 RoboCup 机器人世界杯接轨,鼓
励大学和中学联合组队,大学生与中学生人数比例为 1:1;指导教师不多于三人,大学指导教师不多于两人,高中和初中指导教师分别不多于一人;优秀队员纳入拔尖人才库,推荐参加机器人世界杯 RMRC 赛项国际比赛。致敬长征综合赛中学组与 RoboCup
Junior 青少年机器人世界杯 Rescue Line 项目接轨,优秀队员纳入拔尖人才库,推荐参 RoboCup Junior 青少年机器人世界杯中国赛和国际比赛。
赛事通知(规则)
1.比赛内容:
RMRC 救援机器人比赛是 RoboCup 机器人世界杯正式比赛内
容,RoboCup 中国赛由中国自动化学会主办,中国自动化学会机
器人竞赛工作委员会、中国自动化学会机器人竞赛与培训部承办,
教育部高等学校自动化类专业教学指导委员会协办的一项高级别赛事,是教育部认可的全国普通高校大学生竞赛排行榜榜单赛
事。作为目前国内影响力最大的机器人竞赛,该项赛事从 1999
年至今,大赛每年举办一次,旨在为大学生提供一个良好的创新
和展示平台,提升大学生的实践创新能力,提高人才培养质量。
快速制造救援机器人挑战赛(RoboCupRescue Rapidly
Manufactured Robot Challenge-- RMRC)是一项使用低成本、
可快速制造的小型机器人,开展城市搜救的救援机器人比赛,要
求机器人宽度不大于 30 厘米,要求使用 3D 打印、低成本的通用
传感器、主控板、电子器件等方法制作机器人,降低救援机器人
的制作技术门槛,鼓励使用快速迭代的设计方法开发救援机器人。
RMRC 的比赛场地是一个模拟的地震废墟场景,小型救援机
器人协助搜救建筑物内的模拟受困者,救援机器人及其操作者的
任务就是穿越复杂地形的地震废墟,探索现场未知环境,寻找模
拟受困者,并将获得的信息(受困者位置和状态)标记在救援机
器人所建立的现场地图上。获胜队伍必须能够很好的完成若干任
务。比赛总成绩将按照完成所有任务后的总分高低排出冠、亚、
季军,还可以设置一些单项挑战赛冠军,如通过能力挑战赛、灵
巧操作挑战赛以及自主能力挑战赛等。
快速制造救援机器人挑战赛的目的是为了降低救援机器人
的制作技术门槛,促进小型城市搜救机器人技术的研究与发展,
通过竞赛可以为救援机器人在复杂环境下运行性能提供客观评
价标准。比赛中,各参赛队需要完成具有挑战性的任务,在完成任务的过程中充分展示其救援机器人性能(机动性,感知能力,
定位建图能力,操作界面,远程操控性、自主能力等)。RMRC
比赛是展示一个小型救援机器人技术进步的舞台,也是检验小型
救援机器人系统的实验场,比赛的最终目标是将小型机器人用于
真正的救援任务。
比赛主要考核的机器人性能包括以下几个方面:
能够通过危险,倒塌和杂乱的环境;
确定模拟受困者状态和模拟受困者位置;
自动建立环境地图;
机器人的自主运行能力;
机械臂灵巧操作能力。
提倡参赛队在比赛中展示机器人的其他性能,包括:
递送救援物资;
安置传感器及监控环境;
标示和计算到达模拟受困者距离最近的路径;
帮助模拟受困者脱离危险(比如提供对建筑结构的支撑或其
它安全措施,帮助模拟受困者逃脱)。
RMRC 项目在 RoboCup 比赛中创新性地鼓励中学生和大学生
共同组队,使中学生、大学生在同一项目中竞争学习,共同应对
救援机器人面临的挑战,中学生可以由此获得未来学习与工作成
长的第一手经验。
RMRC 救援机器人比赛分为初赛和决赛,参赛选手按照赛项任务要求综合运用编程软件、3D 设计、3D 打印、开源智能硬件等先进技术创作机器人,并记录创作过程形成项目报告。按照要
求提交参赛资料并参与知识问答。
2.创作工具:
(1)图形化编程软件/仿真物联网编程软件/Arduino
IDE/Micropython
(2)3D 设计软件
(3) 开源智能硬件
(4)3D 打印机
3.参赛作品要求:
(1)结构/外观: 必须使用 3D 设计软件和 3D 打印制造技术创作机器人。
(2)尺寸:宽度不大于 30mm。
4.初赛作品提交内容和要求:
(1)报名表扫描件,PDF 格式。
(2)程序设计文件:
1)图形化编程格式文件 sb3+图形化程序完整截图;
2)仿真物联网编程 lab 格式文件+程序完整截图;
3)Arduino IDE 主程序格式文件 ino+其他模块格式文件 h 或 cpp(如有自定义模块)+程序完整截图;
4)MicroPython 程序格式文件 py+其他模块文件+程序完
整截图;
5)程序完整截图包括接线图和全部程序,如程序较多可 用多张图截取。
(3)结构与外观设计文件,t3d 格式。提交的设计源文件
至少可以分解为五个部分,不得合并成整体。
(4)项目报告,包含至少 5 个步骤的机器人设计和制作过
程,每个步骤包括至少 1 张图片和简要文字说明,机器人完成
后的三个不同角度的实物照片,机器人的接线原理图,PDF 格式。
文字内容要求参赛选手手写,字迹清晰工整。
(5)演示视频:包括机器人的基础运动功能和完成任务功 能等展示,视频为横屏 16:9,时长不超过 2 分钟,大小不超过 100MB,mp4 格式。
(6)软硬件清单,PDF 格式。
(7)提交的项目报告、视频、模型、程序等参赛资料必须 相一致。
作品文件总大小不得超过 200MB。
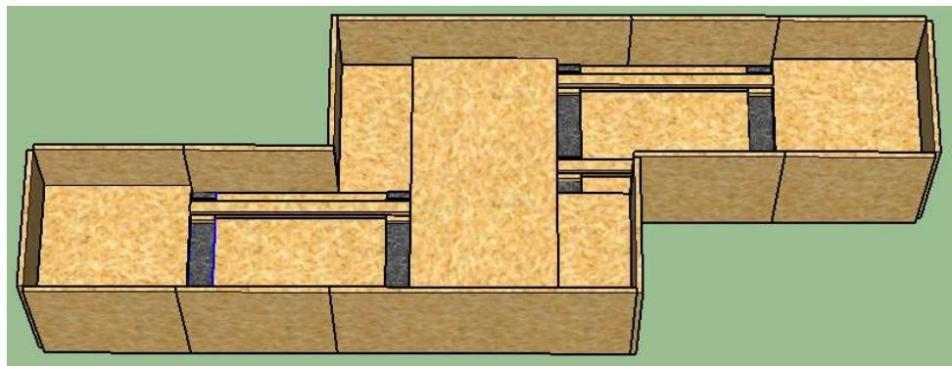
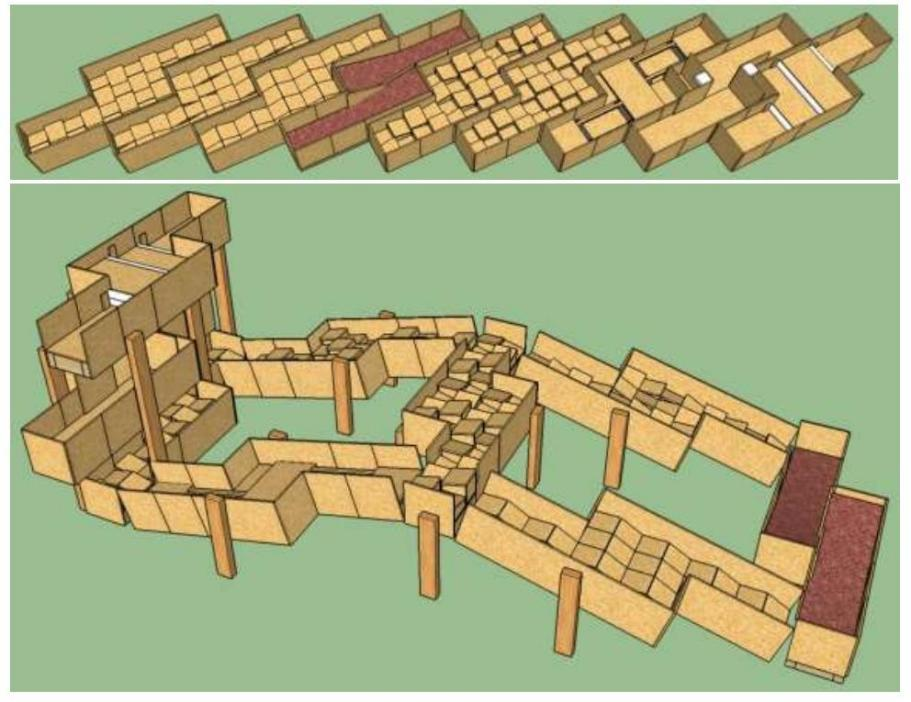
5.测试体系
RoboCup RMRC 救援赛基于标准的机器人测试而设计,能系
统地测试每个机器人的各项能力,新的救援赛包含 9 个地面机
器人测试项目,分为三类:操作性、机动性、敏捷性。 所有模
块都是 1.8 米(6 英尺)长最小宽度为 0.3 米(1 英尺)。
(1)操作性:在简单的地形上完成前进(非自动机器人)
和后退(所有机器人)等基本操作,此部分有三项测试 。
1)测试 1(转弯):将弯道转弯宽度设置成机器人对角 线宽度,考验机器人过弯道时的人机交互意识。

2)测试 2(走直线):两根 25mm 宽的木条将被放置于 场地中,机器人轨迹的外边缘在轨道中间以限制左右误差(类 似于各种运动设计误差)。
3)测试 3(交叉):15°的坡道,交叉点不连续

(2)机动性:四项适用于中等到较难地形的测试,机器人 要能够转身。
1)测试 1(跨栏障碍):在 5cm 高的滚动障碍物上攀 爬或者下降。

2)测试 2(沙/碎石山):坡度为 15°的交替山地地形
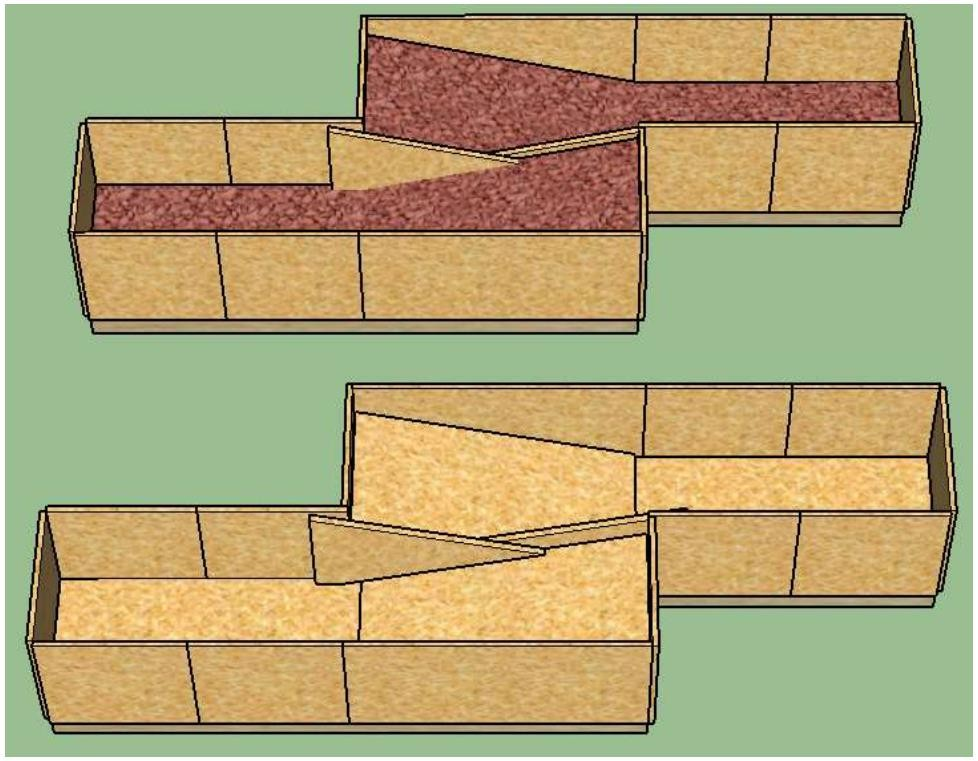
3)测试 3(阶梯):由 15cm 的平顶方块组成的斜山地形

4)测试 4(高架斜坡):由 15cm 顶部倾斜的木块组成的高架斜坡 。

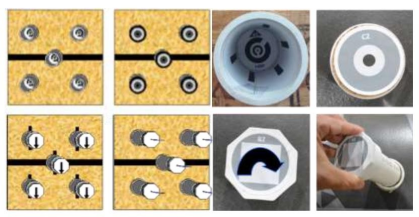
(3)敏捷性:两项关于操作和检查的测试,管子长 10 厘米 (4 英寸),直径 5 厘米(2 英寸),提取旋转帽有 8 个宽约 2 厘米(1 英寸)的刻面。
1)测试 1(平行管道):共触摸,旋转和/或提取平行安装的管道。
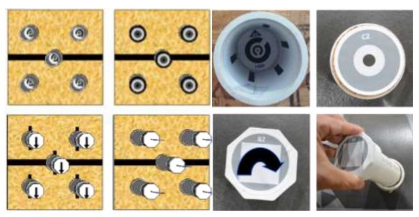
2)测试 2(全指向管道):任务类似于平行管道测试,管道全方位安装。

6.现场比赛规则
(1)初赛:分为两项测试——操作测试和敏捷测试
操作测试:在操作性和机动性测试模块中随机抽取四个模块
进行往返跑测试,总测试时间为 12min(更换测试场地计时不停
止),成功完成一个模块的往返跑测试得 1 分,失败可选择重
复测试。
敏捷测试:触摸,旋转和提取三项测试,每项 1 分。
决赛资格:初赛成绩为两项测试成绩相加,不少于 4 分的队伍可参加决赛。
(2)决赛:操作员控制机器人在搭好的场地上前进,总时
间为 15min,根据机器人前进的距离进行排名,期间不能触碰机
器人,如果机器人被卡住无法前进,可选择在原地调整机器人姿
态,比赛用时加 2min。
7.须知
规则和竞技场布局可能发生变化。
操作员和机器人可采用有线连接。
地图制作可联系组委会
注: 比赛最终安排以及比赛期间出现的临时问题或争议性
问题,由技术委员会协商处理。所有解释权都归技术委员会所有。
报名及作品提交
本平台支持Chrome/Firefox/Safari/360等浏览器,在IE等其他浏览器上不能保证正常运行。
实名注册并登录账号,才能提交报名资料。
如何获取参赛码
1. 进入个人中心

2. 找到比赛栏目

3. 生成个人参赛码